toio_ros2
Introduction
toio_ros2 is ROS 2 package for using toio.
If you are interested in this work, please read https://qiita.com/dandelion1124/items/150ec284d8d85769f745.
Feature
- Control using the
cmd_veltopic - Navigation using the
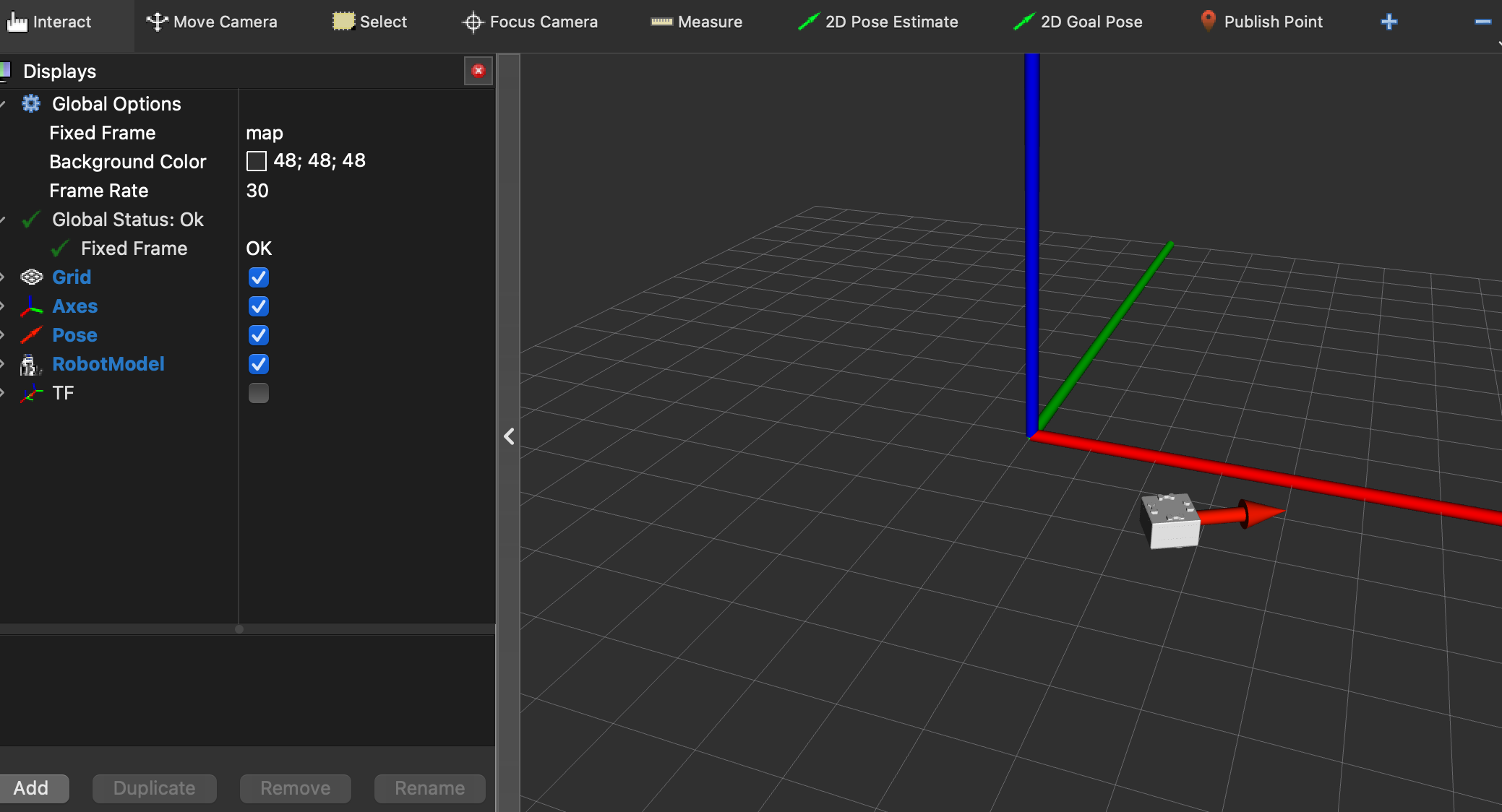
goal_posetopic - Publish
/toio/posetopic andtftopic(position and orientation of toio) - Publish
/toio/battery_levelas battery level information
Requirements
Hardware
- toio Core Cube
- toio play mat
Software
I checked this package on the following environment.
- Ubuntu 24.04
- ROS 2 Jazzy
- toio.py 1.10.0
Subscribed topics
| topic name | Type | Description |
|---|---|---|
| /cmd_vel | geometry_msgs/msg/Twist | desired robot velocity |
| /goal_pose | geometry_msgs/msg/PoseStamped | desired robot pose |
Published topics
| topic name | Type | Description |
|---|---|---|
| /toio/pose | geometry_msgs/msg/PoseStamped | toio pose in map frame |
| /toio/battery_level | std_msgs/msg/Float32 | battery level of toio |
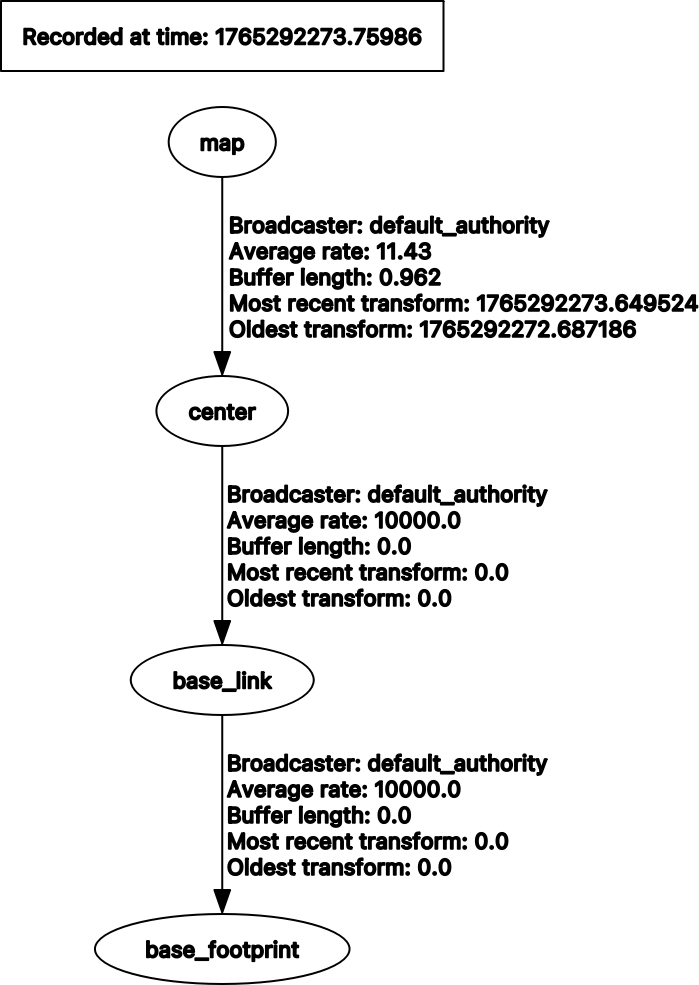
| /tf | - | a valid transform from map to center |
Parameters
Default is a param for A4 mat. Please see https://toio.github.io/toio-spec/docs/hardware_position_id in detail.
| name | Type | Default | Description |
|---|---|---|---|
| field_min_x | double | 98.0 | minimum of x in field |
| field_max_x | double | 402.0 | maximum of x in field |
| field_min_y | double | 142.0 | minimum of y in field |
| field_max_y | double | 358.0 | maximum of y in field |
| field_width_meter | double | 0.297 | width of field(meter) |
| field_height_meter | double | 0.210 | height of field(meter) |
Parameter files is stored in params. And, launch/toio_ros2_bringup.launch.py load params/toio_a4_play_mat_params.yaml as default.
declare_params_file_cmd = DeclareLaunchArgument(
'params_file',
default_value=os.path.join(toio_ros2_dir, 'params', 'toio_a4_play_mat_params.yaml'),
description='Full path to the ROS2 parameters file to use toio_ros2 node')
Frame